/
Turning Considerations
Turning Considerations
- Emily Adam
Owned by Emily Adam
Last updated: May 07, 2021
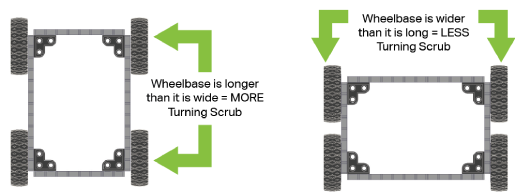
- "Turning scrub" refers to the friction that resists turning on a robot's drivetrain. This occurs from the wheels experiencing drag laterally as the robot completes its turn
- Turning scrub can be reduced by reducing the length of the drivetrain/chassis, The more length, the more sideways movement is required to turn, thus increasing scrub
- Slipping occurs when the wheel does not have a good grip on the terrain
- This can be avoided by using a suspension system – such that the drivetrain and wheel conforms to the terrain shape – and by having a high sprung mass to unsprung mass ratio
- Even better is to use a suspension system that is actively pushing the wheels into the ground, such as designs using springs
- Wheel tread design is also crucial for providing grip to a wheel's surface such that it can catch on the edges of objects
- Stalling occurs when the drivetrain is unable to overcome the turning scrub it experiences
- This means the gearing on the drivetrain motors is too low, as it is not producing enough torque
- Stalling can be avoided by calculating the required torque for overcoming the highest scrub event (i.e. when performing a one-sided turn)
, multiple selections available,
Related content
Bearings
Bearings
More like this
R&D: Research methods of creating & testing custom wheels
R&D: Research methods of creating & testing custom wheels
More like this
2021-09-30 Meeting Minutes - Drivetrain
2021-09-30 Meeting Minutes - Drivetrain
More like this
Flexible Drivetrain Design
Flexible Drivetrain Design
More like this
Drivetrain and Chassis (2021-2022)
Drivetrain and Chassis (2021-2022)
More like this
R&D: Re-design Wheel Assembly Joint for Additional Motor Mounting
R&D: Re-design Wheel Assembly Joint for Additional Motor Mounting
More like this