1 - The Basics
- Mathieu Harter (Deactivated)
Manipulator Joint and Arm Structure
Link: Individual rigid sections that make up a mechanism are called links.
Joint: The connection between two links is called a joint. There are a few different robot joints that can be used. The table below outlines the most common joints found in robotic arms today:

These can be summarized under two types of joints: linear and revolute. In the table above, the first two joints are linear joints and the last three are revolute.
Degrees of Freedom and Manipulator Workspace
The degrees of freedom (DOF) of a robot manipulator or mechanism is the total number of independent variables that can completely identify the configuration of the manipulator mechanism in the space. The following robotic arm has 2 DOF:

While this manipulator has 6 DOF:

The workspace of a manipulator is defined as the set of all end-effector locations (positions and orientations of the end-effector) that can be reached using a combination of joint variables within their permissible ranges, which include physical limitations such as joint limits and link lengths.
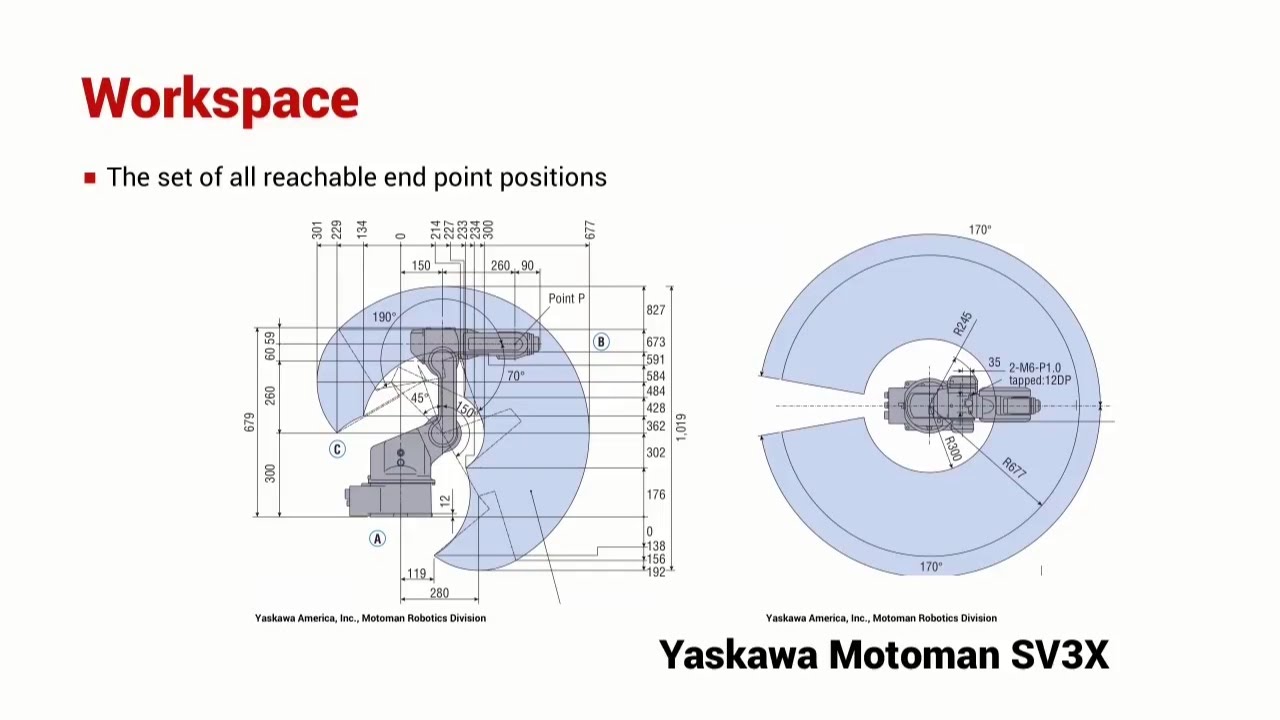
When designing a robotic arm, it is important to consider what workspace you want the robot to have and design the joints accordingly.