...
| Expand | ||||||||
|---|---|---|---|---|---|---|---|---|
| ||||||||
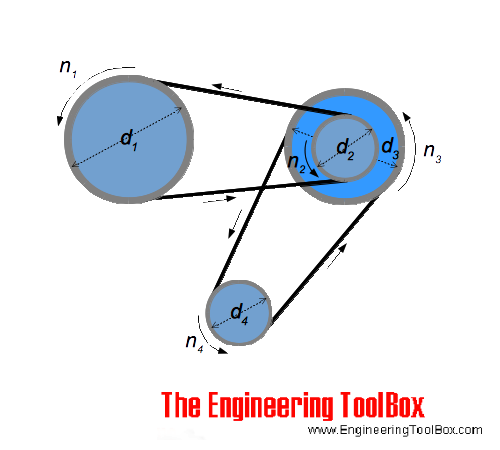
Operation Fundamentals Belt drives use pulleys to transmit torque and power. Generally speaking, you have your input wheel (small diameter) that is connected to an output wheel (large diameter). The ratio of the belt drive works pretty much exactly as described in the Power Transmissions Basics guide, with the larger wheel having speed reduced and torque increased directly proportional to the difference in diameters of the two wheel sizes. Also, the movement of the two pulleys are related via the belt drive rather than direct mechanical mating. There are a couple different types of belt profiles used in power transmission, however robotics typically uses synchronous belt drives with integrated tooth profiles due to their higher level of precision. Figuring out the power transmission of a belt drive is a little bit more complicated, as you need to calculate the teeth in mesh for the belt as well as application factor. We can research this more in depth if we want to use belt drives. Backlash I'm having trouble figuring out citable values for the amount of backlash experienced by belt drives. I think this is due to the fact that finding a citable value for this is pretty complex. Obviously, the teeth that mesh into the pulleys have some degree of clearance that can allow for backlash as you move the timing belt. However, timing belts are under constant tension if designed correctly, and are typically made from either urethane or neoprene which are high friction materials that are less likely to experience slipping on the pulley. As such, backlash doesn't work the same as with a regular gear, as the teeth themselves are under constant forces at all times. However, some searching online shoes that trapezoidal (trapezoidal just refers to the shape of the tooth profile) timing belt drives are known for having low or insignificant backlash when tensioned correctly. Timing belts are commonly used on high precision 3-axis robots like 3D printers, so hopefully that gives some context as to the backlash seen in the belt. I think general consensus is that there may be lower backlash with a belt drive than gearing if tensioned correctly, although this opinion comes from scanning through forum posts rather than academic research (as I couldn't find too much).
Belt Tensioning As you probably noticed, I said that backlash is low when the belt drive is correctly tensioned. Properly tensioning your belt opens up a whole new can of worms if you want to do it correctly. Most belt drives you purchase will come with a recommended tension to meet in order to have the belt to operated as intended. Typically, when installing belt drives it will fit onto the pulley with some very minor slack, then the tensioning method will pull the belt into it's rated tension. There are a few ways to achieve this.
Belt tension isn't something that gets held for ever, and reduces over time. If we use belt drives, we will probably constantly have to tighten the drive to minimze our backlash. OTS Options Neoprene and urethane timing belts and pulleys are readily available on McMaster Carr. If we plan to use timing belts, we should definitely chose urethane variants over neoprene due to their higher precision. Custom Manufacturability Think its pretty obvious that we aren't gonna custom machine a timing belt and pulley. That being said, the housing for these systems on the links will definitely be a custom solution, as there is no one size fits all for timing belts - it's very design specific. I think now would also be a good time to discuss some drawbacks of timing belts. First (and most obviously), they take up a large profile as the belts themselves must be free to move over the linkage, and easily accessible for maintenance. Belts as a Backlash Solution Saw something really cool, so gonna add this section in here.
If you have a gearbox suffering from high backlash, you can use an additional timing belt stage to reduce the backlash it experiences. This could be super useful for our purposes, as we can use less precise gearbox with higher backlash as a base, then add a timing belt for a higher reduction ratio and reduced backlash! OTS Options Neoprene and urethane timing belts and pulleys are readily available on McMaster Carr. If we plan to use timing belts, we should definitely chose urethane variants over neoprene due to their higher precision. Custom Manufacturability Think its pretty obvious that we aren't gonna custom machine a timing belt and pulley. That being said, the housing for these systems on the links will definitely be a custom solution, as there is no one size fits all for timing belts - it's very design specific. I think now would also be a good time to discuss some drawbacks of timing belts. First (and most obviously), they take up a large profile as the belts themselves must be free to move over the linkage, and easily accessible for maintenance. Belt drives will stretch and lose their tension over time, so they need to be replace more often than gears (but are much cheaper to replace). Our linkage design would be a lot more constrained if we want to accommodate belt drives, as we need space to freely fit the whole belt drive and tensioning hardware. Also, its difficult to reach higher reductions on belt drives as it's unrealistic to use a super large diameter gear and timing belt. To achieve higher reductions, multi stage timing belts are generally used however this also takes up a space consideration.
Recommended Joint Location If we want to use belt drives, we should probably look to doing so on the wrist/forearm side instead of arm base and shoulder. The arm base and shoulder should have minimal backlash and high torque which is harder to achieve with a belt drive (rather than planetary, cycloid or strain wave). Belt drives are commonly used in the forearm/wrist operations of industrial robots as they allow you to cluster the motors all at the top end of the forearm for better center of mass optimization. They are also useful in this location, as lower backlash and torque requirements are present as these joints. That being said, I think belt drives might be a bit of a pain to set up and deal with compared to regular drives due to their large profile and constant maintenance.
Extra Resources |



...
| Expand | ||
|---|---|---|
| ||
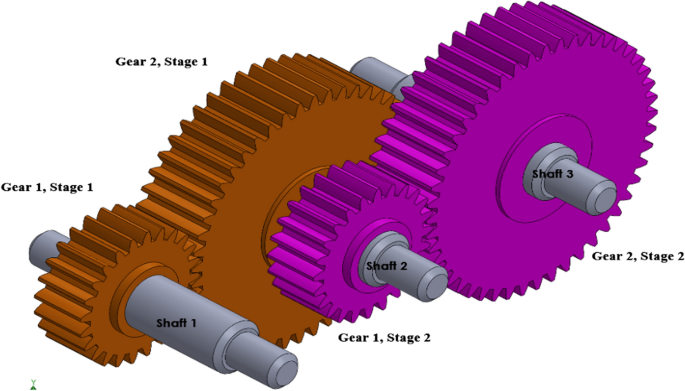
Operation Fundamentals Spur/helical/bevel gears are probably the most common types of transmission. They transmit varying torque and power pretty much exactly as explained in 9 - Power Transmission, so check out that page if you want to figure out how the gears work. Spur gears and helical gears are very common in their operations, and both types of gear typically feature two parallel gears that mate together. The only difference between the two are that spur gears feature straight cut teeth, where as helical gears have angular cut teeth. Helical gears have a higher contact ratio on the teething than spur gears, allowing for higher torque and speed transmission for the same size at the cost of a higher axial gear load. Helical gears are used more commonly in robotics due to their higher torque transmission, but to use them over spur gears you do need to account for the additional axial thrust loads. Also, helical gears can be used to transmit rotation and torque in perpendicular shafts, but I think there are better options to achieve this if necessary, as the mating design can get messy. Stock spur/helical gears are cut to operate at standard distances, defined by: Standard Centerline Distance = (Pinion Pitch Diameter + Gear Pitch Diameter) /2 Single stage helical and spur gears typically have pretty low reduction ratios, with the max reduction for spur gears reaching ~ 1:6 and max reduction for helical gears reaching ~ 1:10. However, the main benefit of helical and spur gears is that they allow for very high transmission ratio through multiple reduction stages. You can stack up multiple stages of transmission in a low profile of gears to achieve high transmission ratios, like shown below. This is likely overkill for our robot arm, but if we really need high transmission we can look into spur or helical gears as an option. When using these transmissions, we also need to consider that the backlash will stack up between mated teeth, so backlash could be increased.
Bevel gears feature an angled tooth profile to allow the transmission of power to perpendicular shafts. Tooth profiles for bevel gears come in multiple forms, such as straight and spiral which offer the same benefits and drawbacks as discussed for spur vs. helical gears. Single stage bevel gears have an approximate standard max ratio of 5:1.
However, bevel gears can improved by shifting to a hypoid gear design. In bevel gears, the two gear axis intersect at a center point. In a hypoid gear, the axis of the two gears are shifted by an offset, which allows for MUCH higher power transmission (up to 200:1)! However, hypoid gears are difficult to mesh properly, and require more maintenance (constant lubing) as the meshed teeth are under higher pressure.
Backlash All gear types in this section require backlash to operate. Backlash is required to allow for the smooth operation of mating gears, and reduces friction by preventing grinding. If you run these gears at 0 backlash, they can seize and fail. I've been able to find some standard backlash gears for spur gears, but not for helical gears. Some sources say that helical gear backlash is lower than spur, but I haven't been able to find too many published values on this notion. These values relate directly to the standard centerline distance formula discussed above. Didn't find too many published values on backlash in bevel gears, as it's mostly dependent on centerline distance for mated gears, reduction ratios and suppliers. There are formulas posted for all types of gears, but as far as empirical values go I would assume backlash between spur and bevel gears is relatively close. General consensus is that these types of gears produce the highest amount of backlash as the types of transmission discussed on this page. Keep in mind tho, that lower pitches will experience lower backlash as physically there is less space for the teeth to wiggle. To reduce backlash in spur and helical gears, the main two options are to change centerline distance in gears or adjust tooth thickness. For our design purposes, only changing centerline distance would really be a feasible option. As an alternative, there are vendors who offer split spur (but not helical, from what I've seen) gears that use split tooth profile and springs to reduce experienced backlash. These use a spring to push half of the split gears teeth into the open space to prevent backlash when gearing stops moving, but still allow for minimal backlash to occur due to the flexibility of the spring. These gears are pretty expensive (72 dollars each from some estimates) so alternate non backlash options can be explored.
OTS Options Spur, standard beve; and helical gears are readily available from multiple gear manufacturers, with KHK being a really easy to access vendor. Hypoid gear models are more difficult to find and procure, from what I've seen they come from mainly international suppliers. Custom Manufacturability We could probably machine spur and straight bevel gears ourselves if we wanted to, however purchasing gears is a MUCH better alternative IMO. Custom machining gears is super unnecessary. Spur and helical gears require pretty precise tooth profiles to be accurate, so it's better to leave those designs for an expert. Helical and spiral bevel gears would probably be difficult to manufacture. Also, these types of gears aren't too expensive, probably ~ $35-75 each (approximations from KHK website). Recommended Joint Location Due to their inherent backlash, I don't think we should really consider any of these the main joints. However, they may be useful on the wrist or end effector where backlash considerations are less significant, as they can be used to increase reduction ratios through their multiple stage transmission and are relatively simple to install. Extra Resources https://khkgears.net/new/gear_knowledge/gear_technical_reference/gear_backlash.html https://www.motioncontroltips.com/hypoid-gearboxes-what-are-they-and-where-are-they-used/ |






...
| Expand | ||||
|---|---|---|---|---|
| ||||
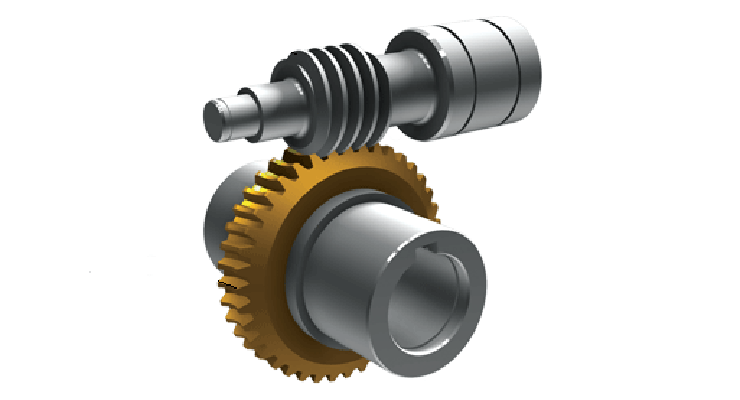
Operation Fundamentals Worm gears offer high ratio transmission to perpendicular axis in a compact profile. A small worm gear is butted against a worm wheel, and the transmission ratio is calculated by dividing the number of teeth in the worm wheel by the number of threads in the worm gear. However, the worm gear typically consists of a single thread, meaning the transmission of the worm gear overall is effectively "Teeth on Worm Wheel" : 1. This value can be changed depending on the number of starts on the worm wheel, however for our applications multi start worm gears are probably unnecessary, as we care about high torque instead of high transmission speed. Worm gears are pretty much always non-backdriveable, with the worm wheel being unable to transmit rotation to the worm gear due to high friction. However, if we do need backdriveability for a worm gear application, some multistart worm drives can* (can being a maybe, in theory it should be easy but backdriveability may still be difficult in practice due to high friction) offer a somewhat backdriveable option at the cost of ratio.
Just as a note, while the worm wheel looks like a standard spur gear, it's actually not the same. Worm wheels have a curved inner profile to allow for better meshing with the worm gear, so make sure you order worm wheels to go with the worm gear!
Backlash Worm gears also feature some degree of backlash between the worm gear and wheel, depending on the set up and gear meshing of the teeth. There are formulas used to describe this backlash, and the total amount can vary from situation from situation. The same methods for reducing worm gear backlash discussed with bevel gears apply, where you can reduce the centerline distances of the gears to reduce backlash at the risk of increasing wear, friction and standard gear operations. However, backlash can be reduced by implementing duplex worm gears, which have a differential thickness on the tooth profile of the worm gear. You shift the worm gear across it's axis of rotation to adjust backlash by changing tooth thickness until a desired value is reached.
Custom Manufacturability Very unnecssary, as worm gear options are very readily available from vendors. I guess we could cut our own worm gears if we really wanted to, but it definitely seems pointless. OTS Options Standard and duplex worm gears are available on KHK to various sizes. Standard worms are also available super cheap on mcmaster. Recommended Joint Location Worm gears would definitely be great to use on the wrist, forearm or end effector as they can provide super high transmission ratios in single stages in a compact profile. However, if we want to main precision i wouldn't use them on any of the larger joints unless duplex worms were used, as they do have some backlash. Worm drives are also really great in any location we deem non-backdriveable joints to be necessary Extra Resources https://en.wikipedia.org/wiki/Duplex_wormas they do have some backlash. Worm drives are also really great in any location we deem non-backdriveable joints to be necessary Extra Resources https://en.wikipedia.org/wiki/Duplex_worm
|



| Expand | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||
Operation Fundamentals Planetary gears are a three part gearing system consisting of a sun gear, planet gears/carrier and outer ring gear. When operating, either the ring gear, planet gear carrier or sun gear is held fixed and one of the other two components serve as the driven and drive gear. When used as a motor reducer, typically the sun serves as the drive, the carrier serves as the driven output, and the ring gear remains stationary.
Calculating gear ratios for planet gear are pretty simple. Once you have established which components are fixed, drive and driven you can figure out ratio by dividing # driven teeth / # drive teeth. To determine number of teeth you have, you can count can teeth on the sun and output rings, then # of planetary teeth in mesh are equal to # sun teeth + # ring teeth.
Planetary gears are a lot better than standard spur gears, as they can reach ratios up to 10:1 in a single transmission stage. This is a much higher ratio than single stage spur gear options. I should mention this now, but limits on transmission ratios for standard and planetary gearing, or any gearing for that matter have to do with realistic sizing usage. Most applications of gearing operate under a space restriction, and transmission ratios typically are proportional to the difference in diameter of the two gears. Tooth pitch for driven and driving gears has to be the same to allow the teeth to mesh properly, so as you continue to scale things up ratios, gear operations become impossible without lowering pitch (which increases tooth spacing so high that the gears will be useless). Backlash Planetary gears can also suffer from backlash, with sources quoting 90-180 arcmin (1.5-3 degreees of play). That seems like a shit ton tho, and IDK if its that bad in real life. I think we would need to contact suppliers when determinig the true backlash of these gears (if we plan to buy it). I also don't know if that quoted backlash value is listed for input or output, as that would vary the resultant backlash. I've seen some high precision planetary gears that offer much lower backlash, so honestly I'm not 100% how to quanitfy expected backlash. Sources claim that backlash in planetary gears is lower than other gear types, but with no values provided. This is probably because for similar external gearing profiles, planetary gears can maintain the lowest tooth pitch due to their 3 component build, which helps reduce experienced backlash Custom Manufacturability If we want to use planet gears, some form of custom solution will likely be necessary. We would probably need wire edm to manufacture precise gears, and can probably test meshing and models with a 3d printer. Custom planetary gears would probably be limited to using standard spur tooth profiles, which is probably ok for our purposes. There are some good tutorials online on how to set up custom planetary gears.
OTS Options There are some suppliers for planetary gearing sets, but typically we would need to integrate some sort of custom planet carrier to really use a planetary gearbox in our arm. As such, going custom for some of the parts would be a much better idea IMO. Joint Locations In construction |

- lead screws
- worm gear
- planetary gear
...