Main Types of Industrial Robots
Overview:
| Cartesian | Cylindrical | Delta | Articulated | SCARA | |
|---|---|---|---|---|---|
| Image |
|
|
|
| |
| Feasibility for rover? | No | Maybe | No | Yes | No |
| Reason for feasibility? | To big, cannot easily extend out of its frame | Similar to SCARA. also need a level surface to work effectively excellent horizontal reach, poor vertical reach primarily used for top down operations | end effector maintains orientation, used for top down operations exclusively | Fantastic reach small footprint (comparatively) | used for top down operations, breaking this design theory to accommodate. would defeat the purpose of a SCARA arm. Cannot guarantee the levelness of the rover during operation, again defeating the purpose. Cannot easily extend below the base fixture, height limited by stroke of vertical axis. We are not exclusively doing pick and place so no need for a pick and place bot. |


Articulated arm wins, its what every other rover has anyways (except for Perseverance's sample handling arm but that's a different level - science mechanism?)
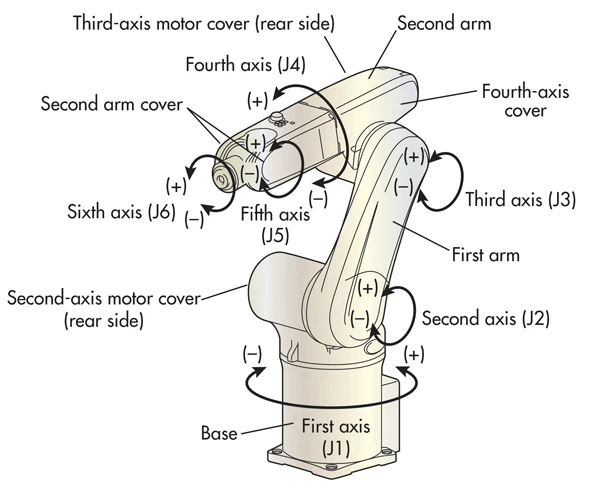
Topology Ideas for Articulated Arm

https://www.hindawi.com/journals/complexity/2017/5156264/
Note that the above arm is designed for measuring purposes, so it may not be suitable for high loads. It is interesting to note that joint 3 and 5 can rotated. Most industrial robots only have joint 5 that can rotate. and another joint after joint 6.




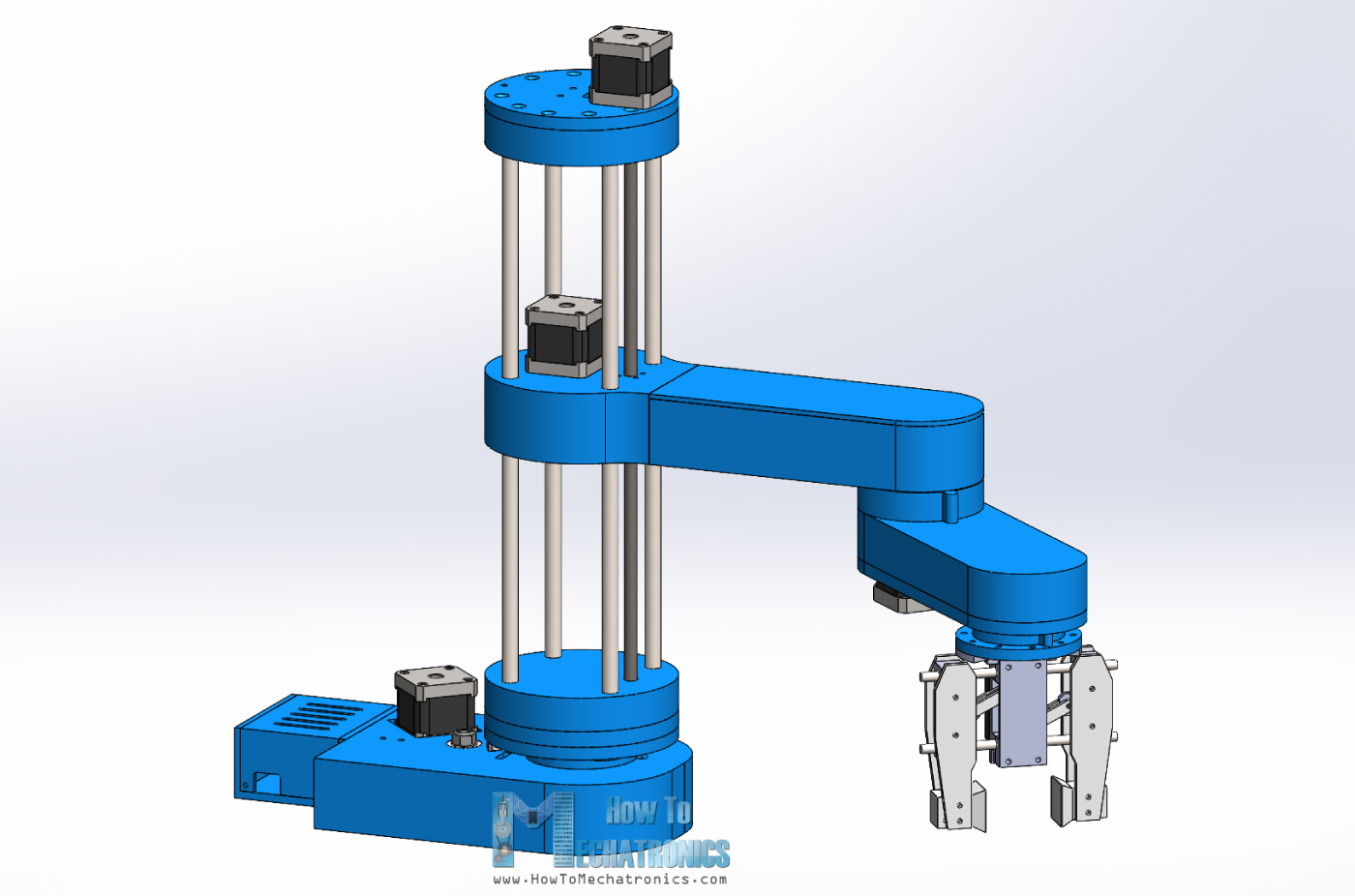
The above patent is a claw for a surgical arm, this one is interesting as the actuator is no where is sight, it is a cable driven claw.


 https://patents.google.com/patent/US8958916B2/en?q=robotic+arm+-surgical&oq=robotic+arm+-surgical
https://patents.google.com/patent/US8958916B2/en?q=robotic+arm+-surgical&oq=robotic+arm+-surgical



