...
Also note that no one uses slip rings! Also note that no one uses coaxial transmission shafts. It might be too difficult to design/too difficult to manufacture or just decided to go direct with the motor. None of these designs look very aesthetic, except for maybe Stanford, but that's my opinion.
End Effector
This is the claw, tool bit and key stroke pusher rolled into one. It is used to grip items in retrieval missions, turn cap screws with a hex drive feature, and push keys on a keyboard. Previously, our team has used an square end Allen key to turn the cap screw as well as push the keys. Some teams use a solenoid to push keys.
...
These pads bay be feasible to create with a fresnel lense as a mold and silicone as the gripper material which can be stuck on the existing gripper. Thought emporium has a well documented video on this. Many use this with soft robots, but this can also be used as a 'glove' on the existing claw.

 Note to self look into what other teams did for allen key
Note to self look into what other teams did for allen key
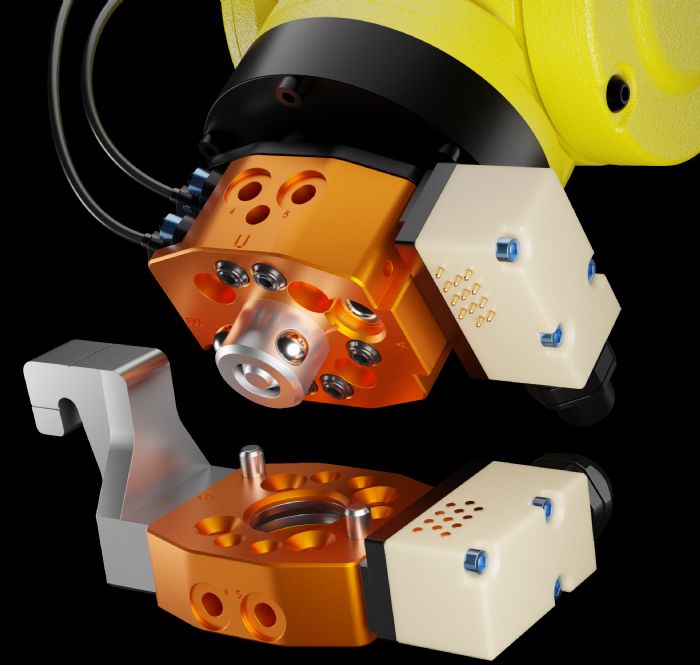
Tool changing.
This could be if we have mutiple different grippers, or a gripper and a allen key, or a hook, etc.
+ It would decrease the complexity of the singular end effector
- increase the complexity of the wrist mount point.
- Have to worry about clean contacts (if the end effector was electrically controlled)
+ Great opportunity to learn
+ Lighter arm
- Heavier overall mechanism