...
| Motor Type | Example | Characteristics | Advantages | Disadvantages | Procurement Availability/Options |
|---|---|---|---|---|---|
| DC motor (brushed) |  |
|
|
| Robot shop, pretty much any motor vendor |
| DC motor (brushless) |
|
|
|
| The Robot Shop or other motor vendor |
| Servo motor |
|
|
|
| The Robot Shop or other motor vendor |
| Stepper motor |
|
|
|
| The Robot Shop or other motor vendor |
| Linear actuator |
|
|
|
| Progressive Automations |
| Solenoid |
|
 |
|
| Newark |
| Hydraulic Actuator |
|
|
|
| Motion Canada |









...
| Widget Connector | ||
|---|---|---|
|
2. Regular Brushless DC moto
3. Linear Actuators
Linear actuators are a form of motor used to transmit high force linear motion in small packages. If we want to use a linear actuator, it would best be suited to the translate the motion of axis 2 and axis 3.
4. Maxon Motors
Common Types of Joint Drives
...
| Expand | ||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||||||
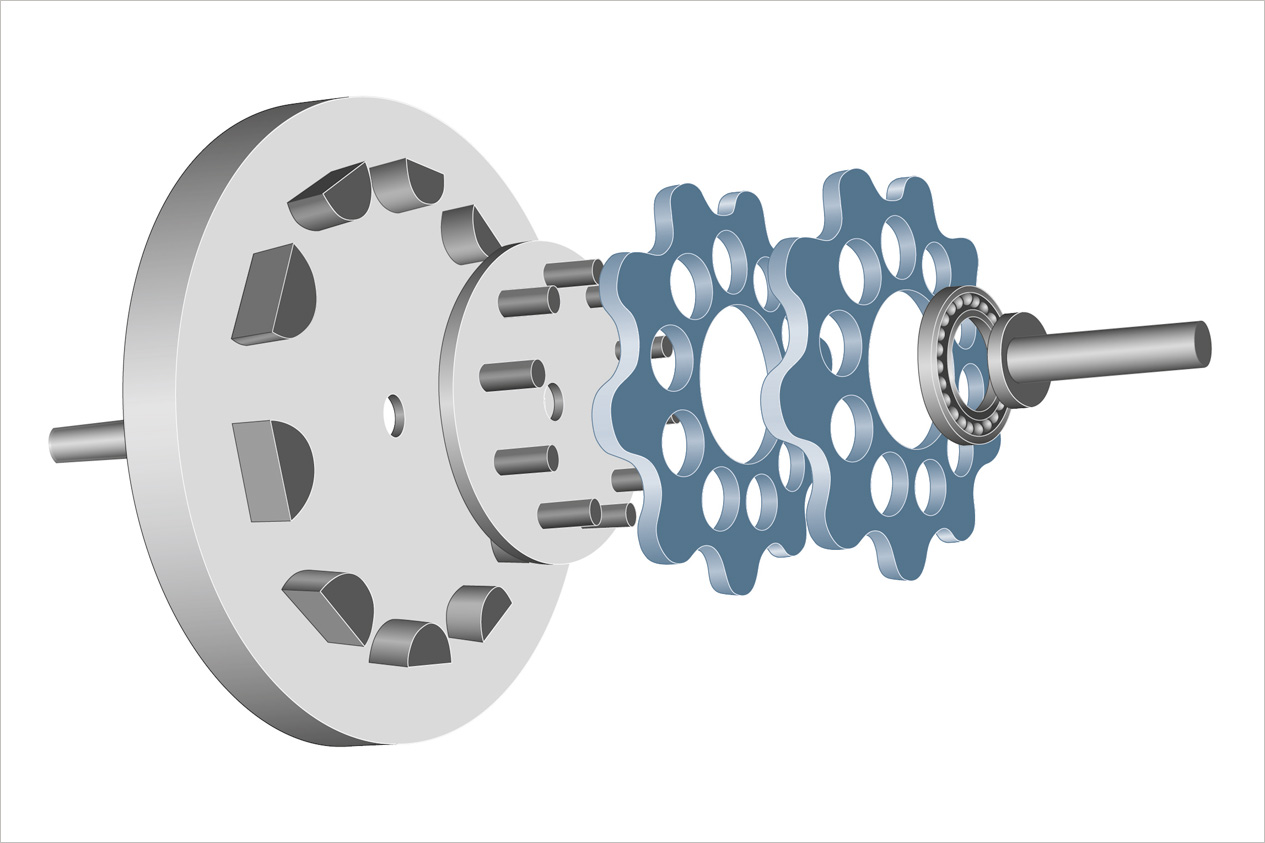
Operation Fundamentals Cycloid drives are a high stiffness and low backlash reducer. Typically, they consist of an input cam shaft, eccentrically mounted bearing, cycloid disc, outer ring pins and output roller and shaft. The cycloidal disk rotates around the outer pins via the eccentric cam, and achieves a gear ratio using the following formula: where:
As a quick example, a cycloid drive with 20 ring pins and 19 lobes on the cycloid disc will achieve a 19:1 reduction rate.
One drawback of cycloid drives is that when using a single cycloidal disc, the eccentric motion of the cam will generate vibrations that will propagate through the motor shaft. However, this is actually relatively easy to fix. Commercial cycloid drives use two cycloidal disks that are shifted by 180°. This counteracts the static imbalance, although generally very small vibrations may still prorogate through the shaft. Backlash In theory, a perfectly constructed cycloid drive will have zero backlash. When perfectly designed, the outer lobes of the cycloid disk will achieve perfect rolling motion with the outer ring pins, resulting in each lobe having one point of contact with any outer ring pin at all times (circled in green in the image below). The output rollers also achieve perfect rolling, so there are always points of contact between all moving components.
However, that is in theory. In reality, you need very precise machining between the cam, bearing, cycloid drive and outer ring pins in order to truly achieve zero backlash. If we design and construct our own cycloid drives, there will likely be some degree of backlash - especially when prototyping. The backlash of an OTS cycloid drive will likely be much lower, although whether or not it will truly have zero backlash can only be determined when testing in person. Cycloid Drives vs Harmonic Drives Cycloid drives often draw comparisons to harmonic drives due to their similar elliptical motion. This paper does a great job to outline an compare some of the key differences in performance between the two types of gears. According to this document, cycloid drives have superior profile/size, inertia and efficiency while harmonic drives have less backlash and torque ripple. However, there's one key thing that I think needs to be considered when reading this paper's claim that cycloid drives hold considerably higher backlash. This paper specifically compared the performance of cycloid and harmonic drives for anthropomorphic robot applications, meaning they compared the performance of small profile drives with very high gear ratios. Furthermore, they compared OTS harmonic drives with cycloid drives that they custom designed and machined to try and match the gear ratio and outer profile of the OTS strain wave gears. To illuminate why this should be considered, lets take a look at the highest backlash cycloid drive cited in the paper.
The custom cycloid drive designed to match the outer profile of the harmonic drive CSF-5 had a max gear ratio of 70 and a cited backlash of 1.4°. Heres a drawing of the CSF-5 that I found online. It has outer dimensions that show a square profile 22mm by 22mm.
If you design a cycloid drive with a gear ratio of 70, that means you have to cram 70 cycloid lobes in this thing, and need to make components just as small. The cited backlash probably has to due with the mating of some of the parts, as once again cycloidal drives need to achieve perfect rolling to have zero backlash and this thing would require some really small components. My guess would be that larger cycloidal drives with smaller gear rations probably have a much lower degree of backlash and would be easier to produce, as the feature size of components becomes a lot larger and easier to work with. IDK tho, just something to consider OTS Options There are some OTS options for cycloidal reducers from various vendors, but its hard to get prices until we can actually spec out some of our motor shaft sizes.
Buying these OTS may not be the most viable option. Although no prices are available after stalking ebay it looks like buying these without any form of sponsorship is gonna cost at least $500 USD. Also, there are made with really robust materials to offer high gearing ratios, so a lot of these brands (apart from the Dojen line) use really bulky and heavy housing. Weight is definitely a consideration for our arm, so having something bulky and expensive may not be ideal when we can somewhat realistically make these ourselves as well. Custom Manufacturability One reason I really like cycloid drives is that they they seem super easy to design in house. In fact, with the exception of maybe belt drives, they seem to be the simplest form of transmission that we can construct ourselves as the individual parts of the cycloid reducer are simple, albeit a bit tight on tolerances. There are tons of resources that simply the construction of these drives, with even solidworks blog even posting a document discussion how to build these drives (with equations provided for the cycloid disk and pins)! There are a lot of resources on youtube documenting the steps to create drives as well.
These drives are hard to get perfect, but we can easily prototype and iterate using 3D printed parts before machining the final reducer design out of aluminum or whatever rigid material deemed necessary. Some other teams have built these drives and it looked like they've used aluminum, lexan and other common materials for construction. However, it will probably take a lot of iteration to get these custom designs perfect and to be realistic we should aim for low (but not zero) backlash. Here are the cycloidal gearboxes designed by Monash, and by Michigan
Recommended Joint Location If we decide to use these types of reducers, I would recommend using them to turn the base of the arm and position the "forearm" style of linkage and not anywhere near the wrist and claw. The wrist and claw doesn't need to worry about backlash as much as the larger parts of the arm, as zero backlash wrist is a bit unnecessary - the wrist is small enough to where some backlash won't hugely affect it's precision, and cycloid drives are a bit too bulky to reliable fit in a small space if custom machined. However, they could be great to adjust the position of the base of the arm and forearm, providing low backlash and a sturdy drive to reduce torque and speed Extra Resources on Cycloid Drives
|







...