...
...
...
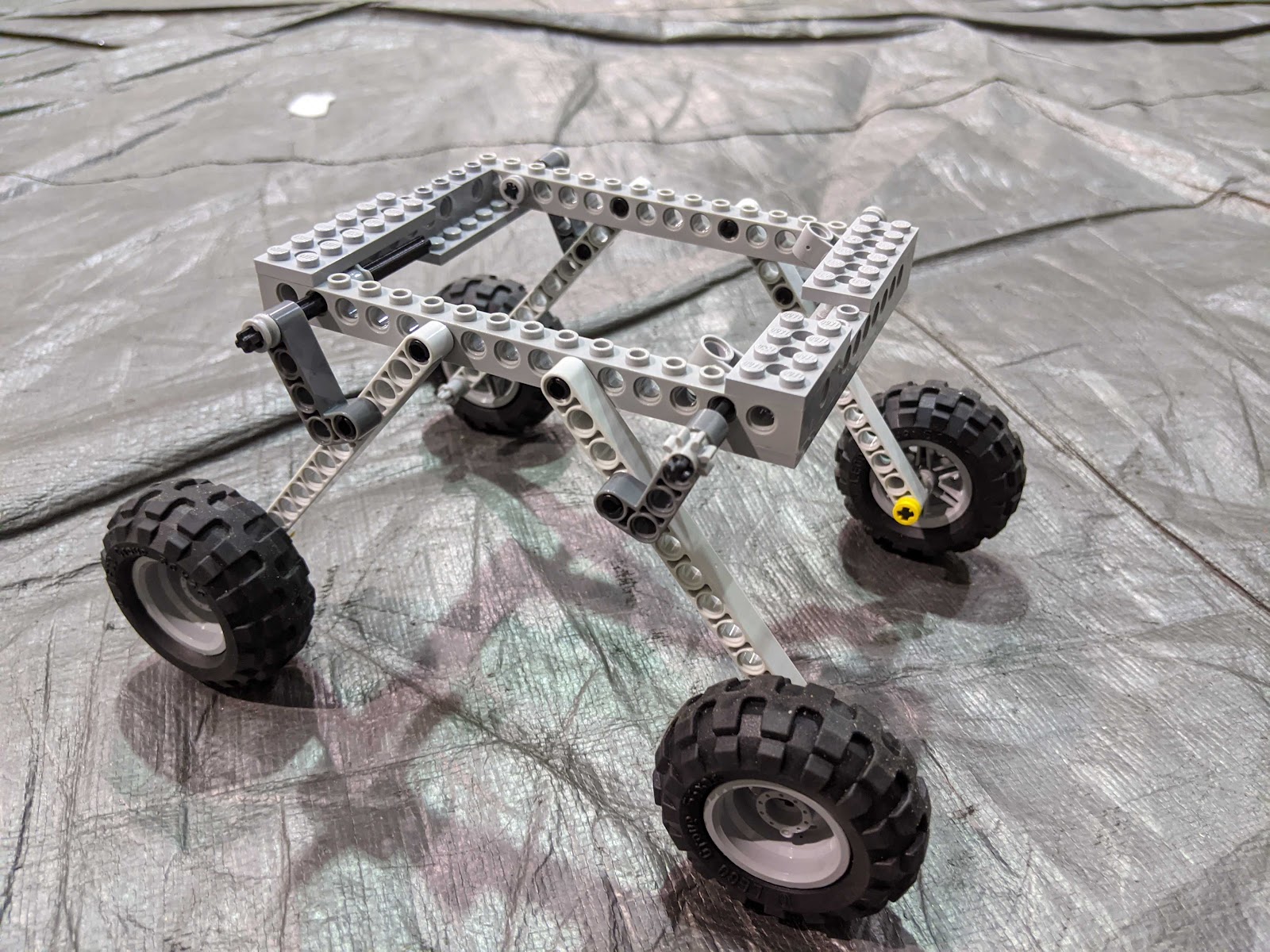
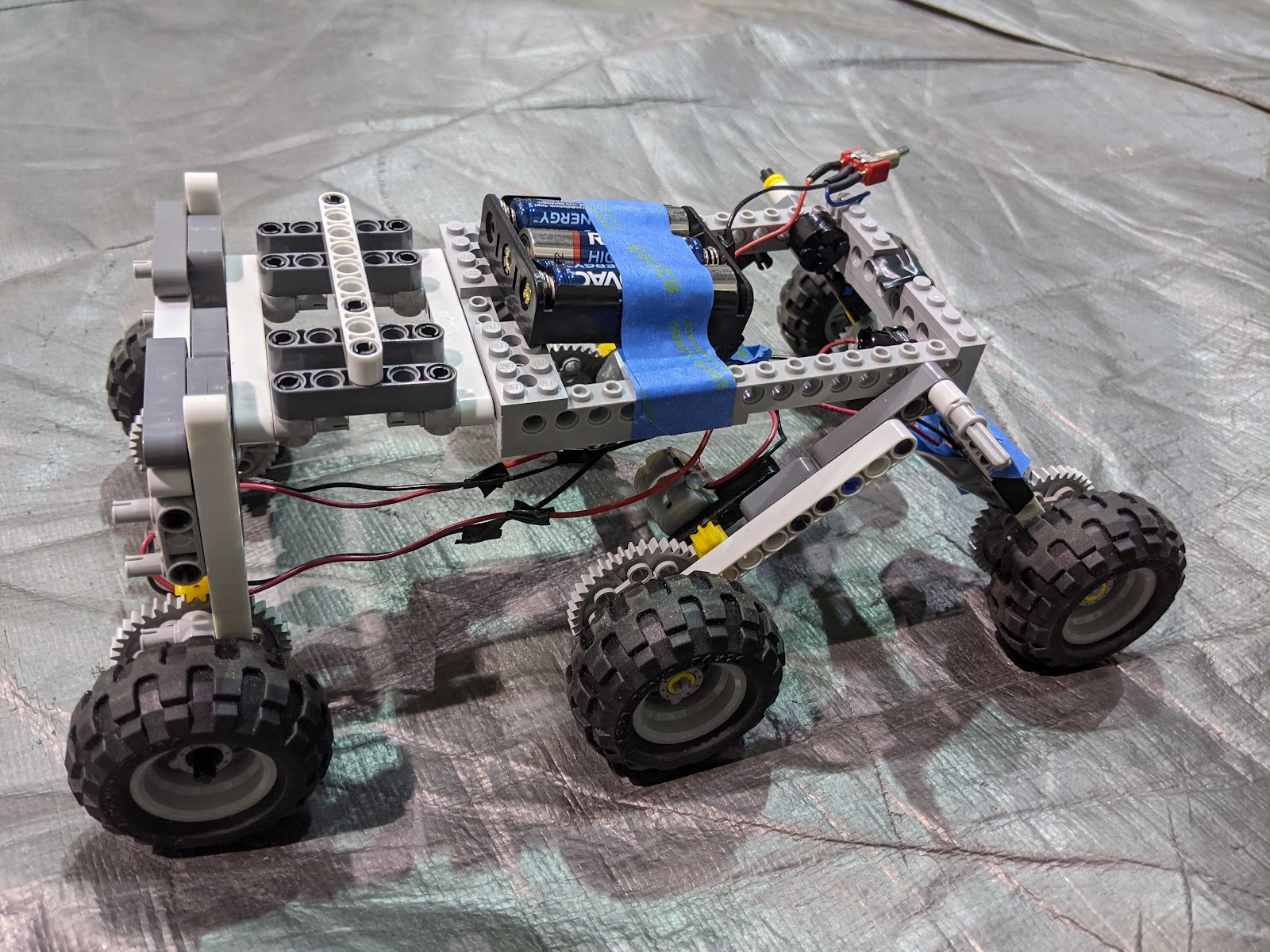
- Concept testing
- Prototype with miniature LEGO or 3D printed models of our most favorable suspension systems

...
- Goal: prove which drivetrain design is more capable of traversing obstacles
Iteration 1: Data Collection to Validate Assumptions
Prototype Goals
- Validate torque requirements so that we can reliable choose our gear ratios
- Verify the effectiveness of our wheel treads/handling system
- Identify weak points and flawed areas in the drivetrain and chassis design
- Gain a better understanding of how the rover will interact with the field
Prototype Plan
- Collect data from driving the rover climbing out of different positions & while turning
- This should be data that we can derive torque from – i.e. speed and/or current draw – so that we have a comparison of our theoretical torque calculations versus actual
- Compare the different tread styles while field testing, looking at each style's climbing VS turning abilities
- Qualitative comparison, but also compare the torque data (which ones were visually successful at the different trials, while also requiring the least amount of torque?)
- Document any high-stress points in the drivetrain
...
- and chassis system that required repair at the end or throughout the tests
- Based on this initial testing, we'll update the design based on the areas we believe don't have enough reinforcement
- Test the rover driving over real terrain and obstacles
- Document any initial, sticky points in the design that can be modified in Prototype 2
- Determine the rover's centre of gravity. Can also do this by placing it on a platform and
...
- tilting it to different angles up to 45 deg
...
- With varying weights loaded onto the chassis (of similar dimensions to our final version), manually or electrically test the difference in turning scrub with each prototype
- Document the difference in turn radius and turning time
- Goal: prove which drivetrain/chassis design experiences the least amount of turning resistance
...
- Test the rover driving over actual terrain and obstacles
- Goal: determine any sticky points that can be eliminated
...
Task List for Prototype 1
- Develop a wooden prototype with a functioning controls system
- Select FRC motors and gear ratios to operate under our assumed torque calculations
- Determine what tools to use to collect motor data
- Develop controls system plan
- Write the code that will log the field data
- Assemble prototype wheels with a variety of different tread styles
- Perform wheel testing
- Perform simulation testing